Hi everyone,
We've had a great first week of the season, and we've accomplished a lot. We analyzed potential strategies, started prototyping various robot systems, and began preparing for our two competitions.
Before we get into the specifics, we have a couple important announcements.
We're going to be going to at least two different competitions this season — the Sacramento Regional from March 23-26 at UC Davis, and the Silicon Valley Regional from April 5-8 at San José State University. The first one, the Sacramento Regional Competition, requires more planning because it's an overnight competition. For specific information on reserving rooms, please reference Onaiza's email (sent Sunday).
To attend either competition, your child must be registered with FIRST. You can register them by following the directions here.
Also, we've been taking photos! We have a couple albums: One for kickoff, and another for the rest of the season so far here. There's also another album of the fall rookie bots here.
So what've we been doing?
This year's challenge was released on January 7, alongside a fancy animation and an extremely long rulebook. In the game, robots compete in two alliances of three bots to outscore the opposing alliance by picking up traffic cones and inflatable cubes, and placing them on special "nodes." Placing these "game pieces" in harder-to-reach spots gets the alliance more points. For the first fifteen seconds of the match, the robot must move autonomously, with no driver control, and at the end of the match the robots can balance on a see-saw to get more points.
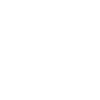
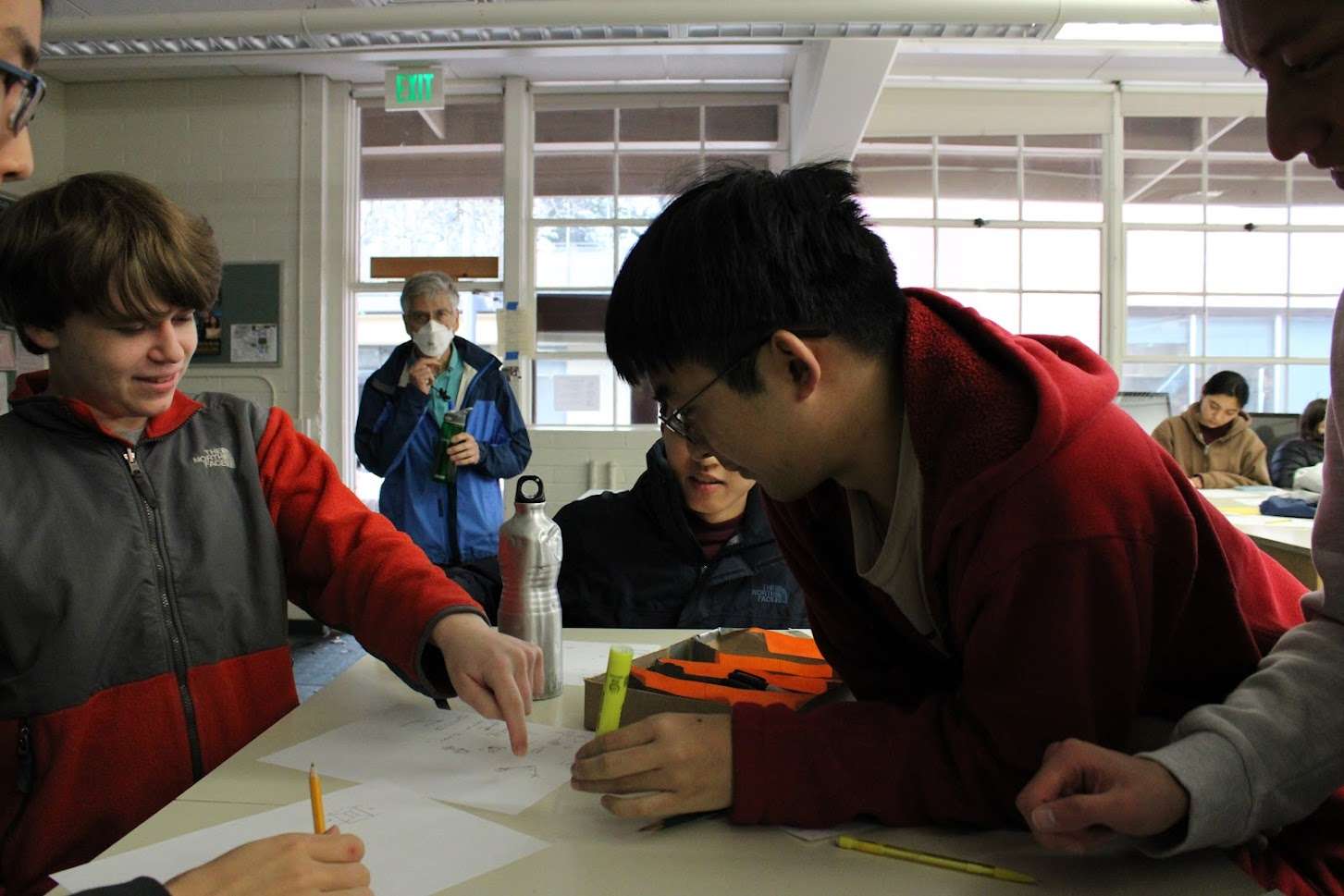
After the reveal, small groups rapidly came up with various grabbers, arms, and other picker-upper ideas, before presenting them to the whole team. We discussed which ideas were the most viable, and began prototyping them. Several students have also helped build mockups of various parts of the playing field, which are vital for getting testing data.
We divided the team into several small groups to prototype an arm system, three different types of grabbers, and an "intake" (a system for picking things up using wheels). We haven't decided which ones we're going to put on our final robot, but we hope to narrow down our selection during tomorrow night's meeting. After that, we'll begin design work on our "Rev A" robot, which is our terminology for a full size prototype bot (the final bot design being "Rev B.") We hope to have Rev A finished by the beginning of Midwinter break to give us enough time to test it out before building Rev B. We're developing at a fantastic pace right now, and we hope to keep it up.
What's next?
We'll be back with important announcements and robot development updates in the coming weeks, so keep checking your inbox. Keep an eye out for competition permission slips, and other important paperwork. We're looking forward to some great progress in the coming weeks.
Good night!
Tommy Knox
Tech President, Team 766

Comments